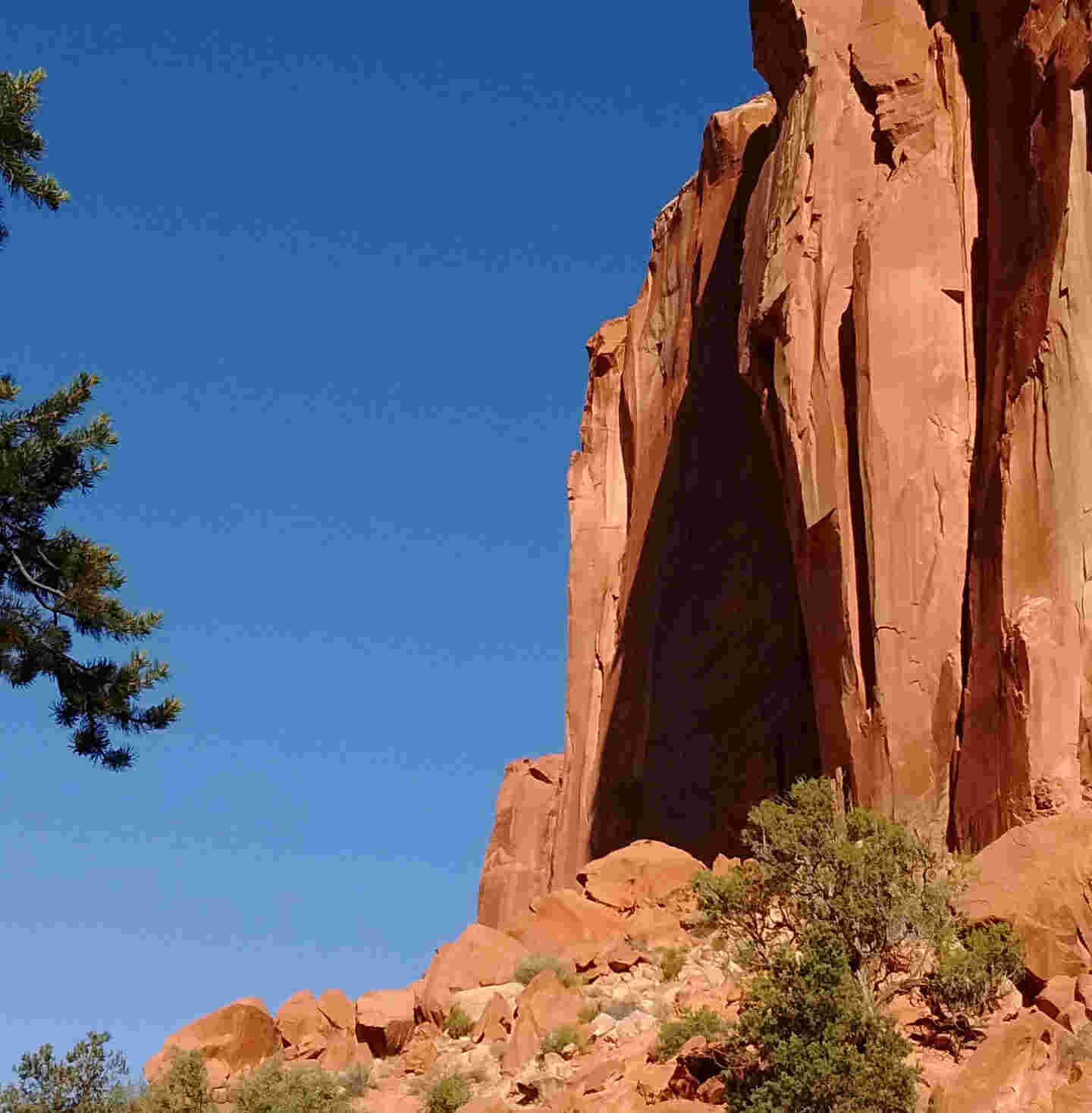
Digital images, such as the photographs taken on your phone, are displayed as a rectangular array of pixels. For example, the photograph in Figure 3.3.1 is 1440 pixels wide and 1468 pixels high. If we were to zoom in on the photograph, we would be able to see individual pixels, such as those shown on the right.
A photograph of a desert canyon wall against a blue sky. There is a deep shadow on the canyon wall, but it is largely a fairly homogeneous orange color. The sky is similarly a fairly homogeneous blue color.
One \(8\times8\) block of pixels taken from the photograph of the desert scene. This block is taken from a region occupied by the canyon wall. The colors of the 64 pixels do not change much. Each of them is a fairly constant orange with small changes in the brightness.
A lot of data is required to display this image. A quantity of digital data is frequently measured in bytes, where one byte is the amount of storage needed to record an integer between 0 and 255. As we will see shortly, each pixel requires three bytes to record that pixel’s color. This means the amount of data required to display this image is \(3\times1440\times1468 = 6,341,760\) bytes or about 6.3 megabytes.
Of course, we would like to store this image on a phone or computer and perhaps transmit it through our data plan to share it with others. If possible, we would like to find a way to represent this image using a smaller amount of data so that we don’t run out of memory on our phone and quickly exhaust our data plan.
As we will see in this section, the JPEG compression algorithm provides a means for doing just that. This image, when stored in the JPEG format, requires only 467,359 bytes of data, which is about 7% of the 6.3 megabytes required to display the image. That is, when we display this image, we are reconstructing it from only 7% of the original data. This isn’t too surprising since there is quite a bit of redundancy in the image; the left half of the image is almost uniformly blue. The JPEG algorithm detects this redundancy by representing the data using bases that are well-suited to the task.
Suppose that we have a basis \(\bcal=\{\vvec_1,\vvec_2,\ldots,\vvec_m\}\) for \(\real^m\text{.}\) Explain what we mean by the representation \(\coords{\xvec}{\bcal}\) of a vector \(\xvec\) in the coordinate system defined by \(\bcal\text{.}\)
A color is represented digitally by a vector in \(\real^3\text{.}\) There are different ways in which we can represent colors, however, depending on whether a computer or a human will be processing the color. We will describe two of these representations, called color models, and demonstrate how they are used in the JPEG compression algorithm.
Digital displays typically create colors by blending together various amounts of red, green, and blue. We can therefore describe a color by putting its constituent amounts of red, green, and blue into a vector \(\threevec{R}{G}{B}\text{.}\) The quantities \(R\text{,}\)\(G\text{,}\) and \(B\) are each stored with one byte of information so they are integers between 0 and 255. This is called the \(RGB\) color model.
The coordinate \(Y\) is called luminance while \(C_b\) and \(C_r\) are called blue and red chrominance, respectively. In this coordinate system, luminance will vary from 0 to 255, while the chrominances vary between -127.5 and 127.5. This is known as the \(YC_bC_r\) color model. (To be completely accurate, we should add 127.5 to the chrominance values so that they lie between 0 and 255, but we won’t worry about that here.)
The diagram below enables you to create colors using various amounts of red, green, and blue. For each of these three quantities, the slider varies between 0 and 255.
The diagram below enables you to create colors using various amounts of luminance \(Y\text{,}\) blue chrominance \(C_b\text{,}\) and red chrominance \(C_r\text{.}\) The luminance slider moves between 0 and 255 while the chrominance sliders move between -127.5 and 127.5.
Find the matrix \(P_{\bcal}\) that converts from \(\threevec{Y}{C_b}{C_r}\) coordinates into \(\threevec{R}{G}{B}\) coordinates. Then find the matrix \(P_{\bcal}^{-1}\) that converts from \(\threevec{R}{G}{B}\) coordinates back into \(\threevec{Y}{C_b}{C_r}\) coordinates.
These two color models provide us with two ways to represent colors, each of which is useful in a certain context. Digital displays, such as those in phones and computer monitors, create colors by combining various amounts of red, green, and blue. The \(RGB\) model is therefore most relevant in digital applications.
By contrast, the \(YC_bC_r\) color model was created based on research into human vision and aims to concentrate the most visually important data into a single coordinate, the luminance, to which our eyes are most sensitive. Of course, any basis of \(\real^3\) must have three vectors so we need two more coordinates, blue and red chrominance, if we want to represent all colors.
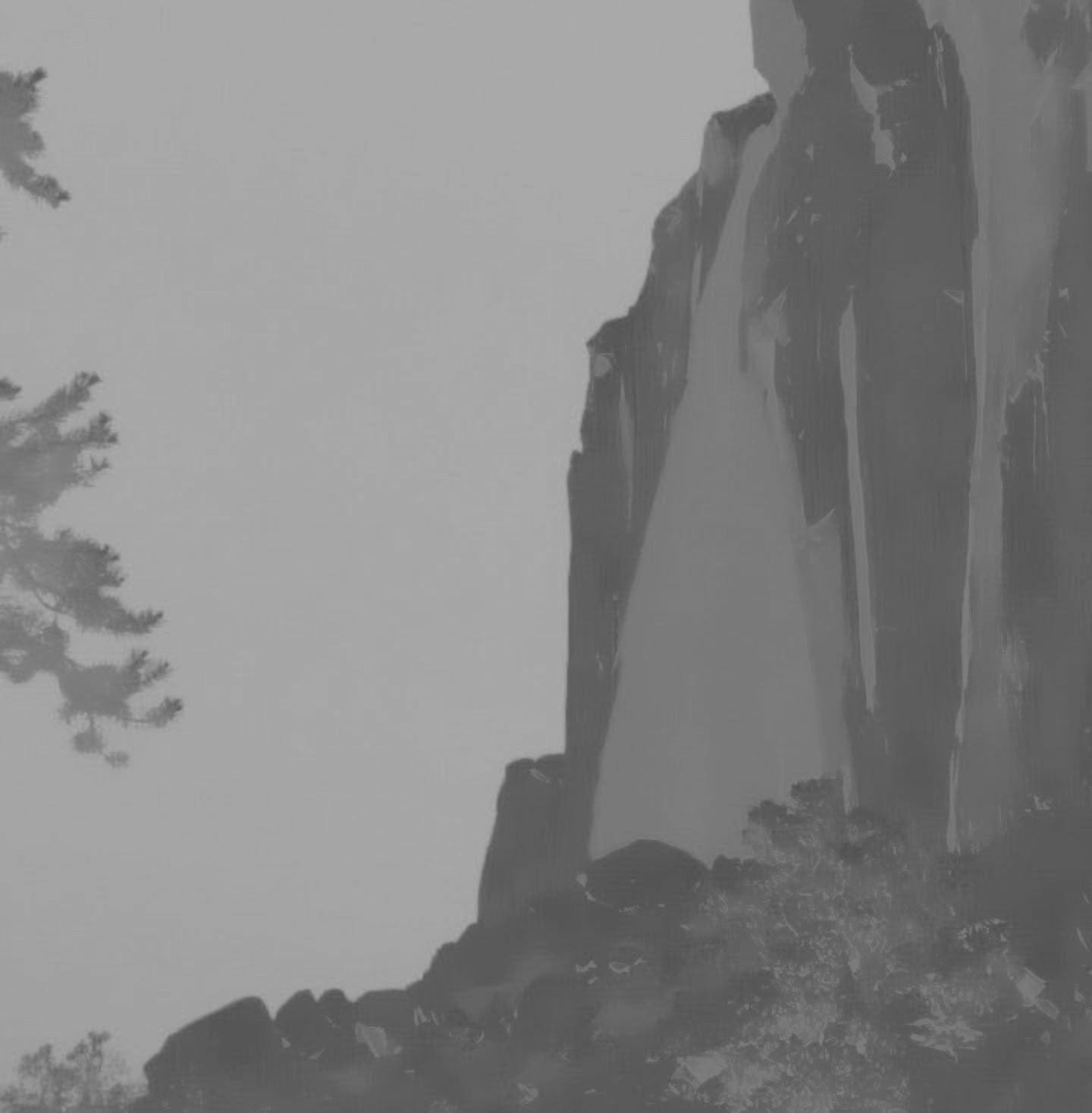
To see this explicitly, shown in Figure 3.3.4 is the original image and the image as rendered with only the luminance. That is, on the right, the color of each pixel is represented by only one byte, which is the luminance. This image essentially looks like a grayscale version of the original image with all its visual detail. In fact, before digital television became the standard, television signals were broadcast using the \(YC_bC_r\) color model. When a signal was displayed on a black-and-white television, the luminance was displayed and the two chrominance values simply ignored.
A photograph of a desert canyon wall against a blue sky. There is a deep shadow on the canyon wall, but it is largely a fairly homogeneous orange color. The sky is similarly a fairly homogeneous blue color.
The same photograph with only the luminance values of each pixel displayed. This essentially looks like a black and white version of the photograph, and most details in the photograph can be discerned. There is a great deal of visual information.
For comparison, shown in Figure 3.3.5 are the corresponding images created using only the blue chrominance and the red chrominance. Notice that the amount of visual detail is considerably less in these images.
The same photograph with only the blue chrominance displayed. There is not as much visual information, and it is harder to make out features in the photograph.
The same photograph with only the red chrominance displayed. There is not as much visual information, and it is harder to make out features in the photograph.
The aim of the JPEG compression algorithm is to represent an image using the smallest amount of data possible. By converting from the \(RGB\) color model to the \(YC_bC_r\) color model, we are concentrating the most visually important data into the luminance values. This is helpful because we can safely ignore some of the data in the chrominance values since that data is not as visually important.
The key to representing the image using a smaller amount of data is to detect redundancies in the data. To begin, we first break the image, which is composed of \(1440\times 1468\) pixels, into small \(8\times8\) blocks of pixels. For example, we will consider the \(8\times8\) block of pixels outlined in green in the original image, shown on the left of Figure 3.3.6. The image on the right zooms in on the block.
The photograph of the desert canyon wall with an eight by eight block of pixels highlighted. The block of pixels, which is taken from a portion of the canyon wall, appears very small.
The same photograph and eight by eight block of pixels is shown at a different scale allowing the reader to see some detail inside the block of pixels.
Figure3.3.6.An \(8\times8\) block of pixels outlined in green in the original image on the left. We see the same block on a smaller scale on the right.
Notice that this block, as seen in the original image, is very small. If we were to change some of the colors in this block slightly, our eyes would probably not notice.
Here we see a close-up of the block. The important point here is that the colors do not change too much over this block. In fact, we expect this to be true for most of the blocks. There will, of course, be some blocks that contain dramatic changes, such as where the sky and rock intersect, but they will be the exception.
Following our earlier work, we will change the representation of colors from the \(RGB\) color model to the \(YC_bC_r\) model. This separates the colors into luminance and chrominance values that we will consider separately. In Figure 3.3.8, we see the luminance values of this block. Again, notice how these values do not vary significantly over the block.
The numerical values for the luminance in the eight by eight block of pixels. In general, luminance values lie between 0 and 255. The values in this block show relatively little variation. Most values are between 150 and 170 though there are a few values in one section close to 130.
Our strategy in the compression algorithm is to perform a change of basis to take advantage of the fact that the luminance values do not change significantly over the block. Rather than recording the luminance of each of the pixels, this change of basis will allow us to record the average luminance along with some information about how the individual colors vary from the average.
On first glance, this probably looks intimidating, but we can make sense of it by looking at these vectors graphically. Shown in Figure 3.3.9 are four of these basis vectors. Notice that \(\vvec_0\) is constantly 1, \(\vvec_1\) varies relatively slowly, \(\vvec_2\) varies a little more rapidly, and \(\vvec_7\) varies quite rapidly. The main thing to notice is that: the basis vectors vary at different rates with the first vectors varying relatively slowly and the later vectors varying more rapidly.
A graphical representation of four of the Fourier basis vectors is given. In the upper left diagram is a representation of \(\vvec_0\text{,}\) whose components are constantly one. The diagram has a horizontal axis labeled from zero to seven, and there is a point plotted above each label at a height of one on the vertical axis.
A representation of \(\vvec_1\) is given in the upper right corner. The points plotted lie on the graph of a slowly varying cosine function that begins at \(1\) and ends at \(-1\text{.}\)
The basis vector \(\vvec_2\) is represented in the lower left with the points lying on the graph of a cosine function that varies a little more rapidly, beginning and ending at just a little less than \(1\text{.}\)
Finally, the basis vector \(\vvec_7\) is represented with the points lying on a rapidly varying cosine function, which has three peaks and three valleys.
These vectors form the basis \(\bcal\) for \(\real^8\text{.}\) Remember that \(\xvec\) is the vector of luminance values in the first column as seen on the right. We will write \(\xvec\) in the new coordinates
A visual representation of the vector formed by the components in the vector \(\xvec\text{,}\) which gives the luminance values in the first column of the eight by eight block. There is a slight increase from the first to second value, then a gentle decrease to the fifth value, and then a gentle increase until the eighth.
Describe the effect that \(F_0\) has on the vector \(\xvec\text{.}\) Would you describe the components in \(\xvec\) as constant, slowly varying, or rapidly varying?
Describe the effect that \(F_3\) has on the vector \(\xvec\text{.}\) Would you describe the components in \(\xvec\) as constant, slowly varying, or rapidly varying?
Describe the effect that \(F_7\) has on the vector \(\xvec\text{.}\) Would you describe the components in \(\xvec\) as constant, slowly varying, or rapidly varying?
The Sage cell below will construct the vector \(P_{\bcal}\text{,}\) which is denoted P, and its inverse \(P_{\bcal}^{-1}\text{,}\) which is denoted Pinv. Evaluate this Sage cell and notice that it prints the matrix \(P_{\bcal}^{-1}\text{.}\) Now look at the form of \(P_{\bcal}^{-1}\) and explain why \(F_0\) is the average of the luminance values in the vector \(\xvec\text{.}\)
The Sage cell below defines the vector \(\xvec\text{,}\) which is the vector of luminance values in the first column, as seen in Figure 3.3.8. Use the cell below to find the vector \(\fvec\) of Fourier coefficients \(F_0,F_1,\ldots,F_7\text{.}\) If you have evaluated the cell above, you will still be able to refer to P and Pinv in this cell. Write the Fourier coefficients and discuss the relative sizes of the coefficients.
Let’s see what happens when we simply ignore the coefficients \(F_6\) and \(F_7\text{.}\) Form a new vector of Fourier coefficients by rounding the coefficients to the nearest integer and setting \(F_6\) and \(F_7\) to zero. This is an approximation to \(\fvec\text{,}\) the vector of Fourier coefficients. Use the approximation to \(\fvec\) to form an approximation of the vector \(\xvec\text{.}\) How much does your approximation differ from the actual vector \(\xvec\text{?}\)
When we ignore the Fourier coefficients corresponding to rapidly varying basis elements, we see that the vector \(\xvec\) that we reconstruct is very close to the original one. In fact, the luminance values in the approximation differ by at most one or two from the actual luminance values. Our eyes are not sensitive enough to detect this difference.
So far, we have concentrated on only one column in our \(8\times8\) block of luminance values. Let’s now consider all of the columns. The following Sage cell defines a matrix called luminance, which is the \(8\times8\) matrix of luminance values. Find the \(8\times8\) matrix \(F\) whose columns are the Fourier coefficients of the columns of luminance values.
Notice that the first row of this matrix consists of the Fourier coefficient \(F_0\) for each of the columns. Just as we saw before, the entries in this row do not change significantly as we move across the row. In the Sage cell below, write these entries in the vector \(\yvec\) and find the corresponding Fourier coefficients.
Up to this point, we have been working with the luminance values in one \(8\times8\) block of our image. We formed the Fourier coefficients for each of the columns of this block. Once we notice that the Fourier coefficients across a row are relatively constant, it seems reasonable to find the Fourier coefficients of the rows of the matrix of Fourier coefficients. Doing so leads to the matrix
If we were to look inside a JPEG image file, we would see lots of matrices like this. For each \(8\times 8\) block, there would be three matrices of Fourier coefficients of the rows of Fourier coefficients, one matrix for each of the luminance, blue chrominance, and red chrominance values. However, we store these Fourier coefficients as integers inside the JPEG file so we need to round off the coefficients to the nearest integer, as shown here:
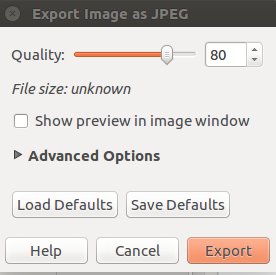
In fact, when a JPEG file is created, there is a “quality” parameter that can be set, such as that shown in Figure 3.3.13. When the quality parameter is high, we will store many of the Fourier coefficients; when it is low, we will ignore more of them.
A window from a graphics software package allowing a user to control the quality of an exported JPEG image on a numerical scale from \(0\) to \(100\text{.}\)
To see how this works, suppose the quality setting is relatively high. After rounding off the Fourier coefficients, we will set all of the coefficients whose absolute value is less than 2 to zero, which creates the matrix:
Notice that there are 12 nonzero Fourier coefficients, out of 64, that we need to record. Consequently, we only save \(12/64 \approx
19\%\) of the data.
If instead, the quality setting is relatively low, we set all of the Fourier coefficients whose absolute value is less than 4 to zero, creating the matrix:
Notice that there are only 5 nonzero Fourier coefficients that we need to record now, meaning we save only \(5/64\approx 8\%\) of the data. This will result in a smaller JPEG file describing the image.
With a lower quality setting, we have thrown away more information about the Fourier coefficients so the image will not be reconstructed as accurately. To see this, we can reconstruct the luminance values from the Fourier coefficients by converting back into the standard coordinate system. Rather than showing the luminance values themselves, we will show the difference in the original luminance values and the reconstructed luminance values. When the quality setting was high and we stored 12 Fourier coefficients, we find this difference to be
This demonstrates the trade off. With a high quality setting, we require more storage to save more of the data, but the reconstructed image is closer to the original. With the lower quality setting, we require less storage, but the reconstructed image differs more from the original.
If we remember that the visual information stored by the blue and red chrominance values is not as important as that contained in the luminance values, we feel safer in discarding more of the Fourier coefficients for the chrominance values resulting in an even greater savings.
Shown in Figure 3.3.14 is the original image compared to a version stored with a very low quality setting. If you look carefully, you can individual \(8\times8\) blocks.
The original photograph saved with a lower quality setting in the JPEG compression algorithm, which results in the loss of some visual information. For instance, individual \(8\times8\) blocks can be seen, which disrupt the illusion that we are looking at a desert scene.
This discussion of the JPEG compression algorithm is meant to explore the ideas that underlie its construction and demonstrate the importance of a choice of basis and its accompanying coordinate system. There are a few details, most notably about the rounding of the Fourier coefficients, that are not strictly accurate. The actual implementation is a little more complicated, but the presentation here conveys the spirit of the algorithm.
The JPEG compression algorithm allows us to store image files using only a fraction of the data. Similar ideas are used to efficiently store digital music and video files.
This section has explored how appropriate changes in bases help us reconstruct an image using only a fraction of its data. This is known as image compression.
There are several ways of representing colors, all of which use vectors in \(\real^3\text{.}\) We explored the \(RGB\) color model, which is appropriate in digital applications, and the \(YC_bC_r\) model, in which the most important visual information is conveyed by the \(Y\) component, known as luminance.
We also explored a change of basis called the Discrete Fourier Transform. In the coordinate system that results, the first coefficient measures the average of the components of a vector. Other coefficients measure variations in the components away from the average.
We put both of these ideas to use in demonstrating the JPEG compression algorithm. An image is broken into \(8\times8\) blocks, and the colors into luminance, blue chrominance, and red chrominance. Applying the Discrete Fourier Transform allows us to reconstruct a good approximation of the image using only a fraction of the original data.
We will now form the vector \(\yvec\text{,}\) which is an approximation of \(\xvec\) by rounding all the Fourier coefficients of \(\xvec\) to the nearest integer to obtain \(\coords{\yvec}{\ccal}\text{.}\) Now find the vector \(\yvec\) and compare this approximation to \(\xvec\text{.}\) What is the error in this approximation?
Repeat the last part of this problem, but set the rounded Fourier coefficients to zero if they have an absolute value less than five. Use it to create a second approximation of \(\xvec\text{.}\) What is the error in this approximation?
Compare the number of nonzero Fourier coefficients that you have in the two approximations and compare the accuracy of the approximations. Using a few sentences, discuss the comparisons that you find.
The Fourier transform that we used in this section is often called the Discrete Fourier Cosine Transform because it is defined using a basis \(\ccal\) consisting of cosine functions. There is also a Fourier Sine Transform defined using a basis \(\scal\) consisting of sine functions. For instance, in \(\real^4\text{,}\) the basis vectors of \(\scal\) are
A visual representation of the four basis vectors similar to that in Figure 3.3.9. There are four diagrams demonstrating that the components of \(\vvec_1\) vary slowly while the components of \(\vvec_4\) vary quite rapidly.
The Sage cell below defines the matrix S whose columns are the vectors in the basis \(\scal\) as well as the matrix C whose columns form the basis \(\ccal\) used in the Fourier Cosine Transform.
In the \(8\times8\) block of luminance values we considered in this section, the first column begins with the four entries 176, 181, 165, and 139, as seen in Figure 3.3.8. These form the vector \(\xvec=\fourvec{176}{181}{165}{139}\text{.}\) Find both \(\coords{\xvec}{\scal}\) and \(\coords{\xvec}{\ccal}\text{.}\)
Write a sentence or two comparing the values for the Fourier Sine coefficients \(\coords{\xvec}{\scal}\) and the Fourier Cosine coefficients \(\coords{\xvec}{\ccal}\text{.}\)
Suppose now that \(\xvec=\fourvec{100}{100}{100}{100}\text{.}\) Find the Fourier Sine coefficients \(\coords{\xvec}{\scal}\) and the Fourier Cosine coefficients \(\coords{\xvec}{\ccal}\text{.}\)
The following Sage cell defines the matrix W whose columns are the basis vectors in \(\wcal\text{.}\) If \(\xvec\) is the first column of luminance values in the \(4\times4\) block above, find the wavelet coefficients \(\coords{\xvec}{\wcal}\text{.}\)
Notice that \(H_1\) gives the average value of the components of \(\xvec\) and \(H_2\) describes how the averages of the first two and last two components differ from the overall average. The coefficients \(H_3\) and \(H_4\) describe small-scale variations between the first two components and last two components, respectively.
If we set the last wavelet coefficients \(H_3=0\) and \(H_4=0\text{,}\) we obtain the wavelet coefficients \(\coords{\yvec}{\wcal}\) for a vector \(\yvec\) that approximates \(\xvec\text{.}\) Find the vector \(\yvec\) and compare it to the original vector \(\xvec\text{.}\)
What impact does the fact that \(H_3=0\) and \(H_4=0\) have on the form of the vector \(\yvec\text{?}\) Explain how setting these coefficients to zero ignores the behavior of \(\xvec\) on a small scale.
In the JPEG compression algorithm, we looked at the Fourier coefficients of all the columns of luminance values and then performed a Fourier transform on the rows. The Sage cell below will perform the same operation using the wavelet transform; that is, it will first find the wavelet coefficients of each of the columns and then perform the wavelet transform on the rows. You only need to evaluate the cell to find the wavelet coefficients obtained in this way.
Now set all the wavelet coefficients equal to zero except those in the upper left \(2\times2\) block and use them to define the matrix coeffs in the Sage cell below. This has the effect of ignoring all of the small-scale differences. Evaluating this cell will recover the approximate luminance values.
In this section, we looked at the \(RGB\) and \(YC_bC_r\) color models. In this exercise, we will look at the \(HSV\) color model where \(H\) is the hue, \(S\) is the saturation, and \(V\) is the value of the color. All three quantities vary between 0 and 255.
Increase the value \(V\) to 255, which is on the far right. Describe what happens when you vary the saturation \(S\) using a fixed hue \(H\) and value \(V\text{.}\)
The \(YC_bC_r\) color model concentrates the most important visual information in the luminance coordinate, which roughly measures the brightness of the color. The other two coordinates describe the hue of the color. By contrast, the \(HSV\) color model concentrates all the information about the hue in the \(H\) coordinate.
This is useful in computer vision applications. For instance, if we want a robot to detect a blue ball in its field of vision, we can specify a range of hue values to search for. If the lighting changes in the room, the saturation and value may change, but the hue will not. This increases the likelihood that the robot will still detect the blue ball across a wide range of lighting conditions.